
Schüler:innen-AG auf dem Weg zum eigenen Quadrocopter
Von Gerhard Klähn
Seit dem letzten Schuljahr bietet die BBS II Wolfsburg eine AG an, in der die Schüler:innen einen eigenen Quadrocopter entwickeln. Dabei lernen sie Schritt für Schritt aus welchen technischen Komponenten dieses Flugobjekt besteht und wie diese mit dem Mikrocontroller ESP32 verbunden werden. Sie entwickeln C‑Programme, mit denen der Mikrocontroller die Steuerung aller Komponenten durchführt und lernen, wie mit Hilfe der Mathematik und einfachen physikalischen Grundkenntnissen eine digitale Lage-Regelung und verschiedene Flugmanöver realisiert werden können.
Um auf einfache Weise in die Technik einsteigen und die vorhandenen Laborgeräte nutzen zu können, wurde als erstes Ziel die Entwicklung einer Minidrohne mit kleinen Gleichstrommotoren vorgegeben.
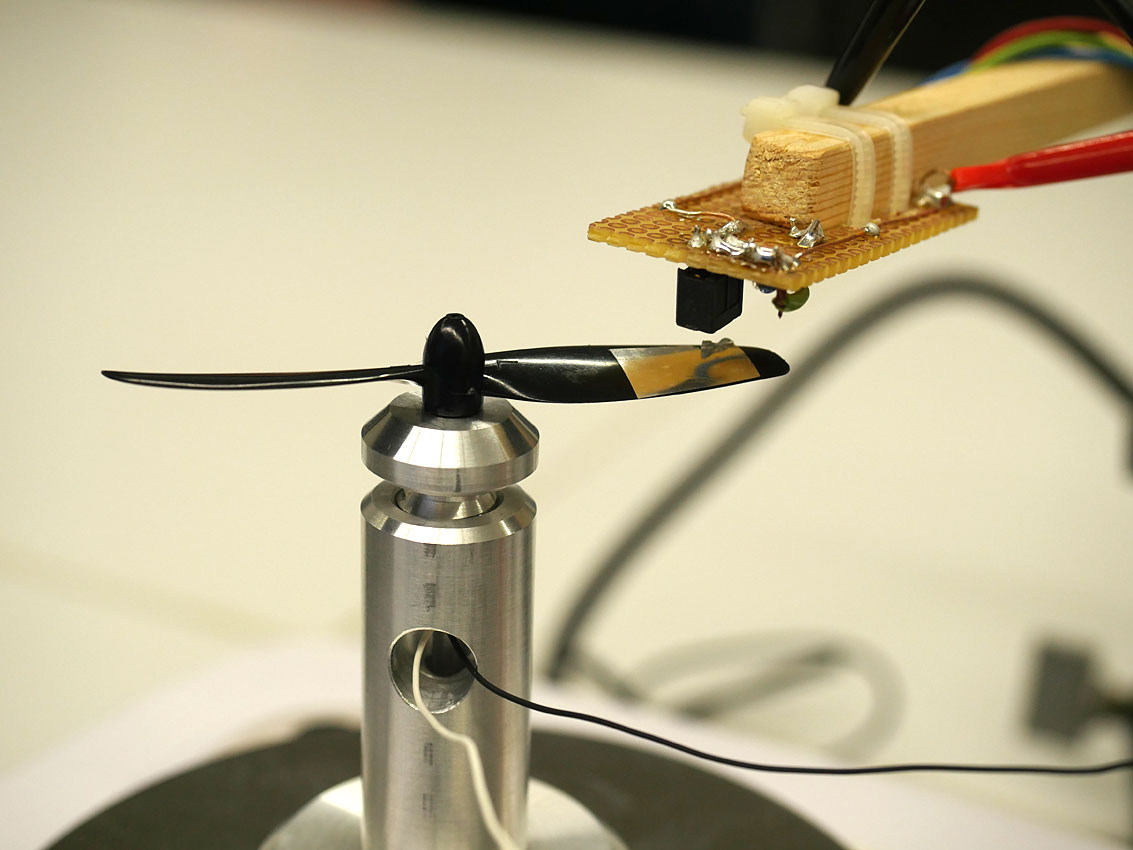
Der Weg zur Minidrohne begann mit der Messung von Daten zur Ermittlung verschiedener Motorkennlinien unter der Propeller-Last. Die dazu erforderliche Halterung für die kleinen Motoren wurde spontan vom Kollegen unserer Schule Sven Steinkamp (Werkzeugausgabe Metallwerkstatt) konstruiert und gefertigt.
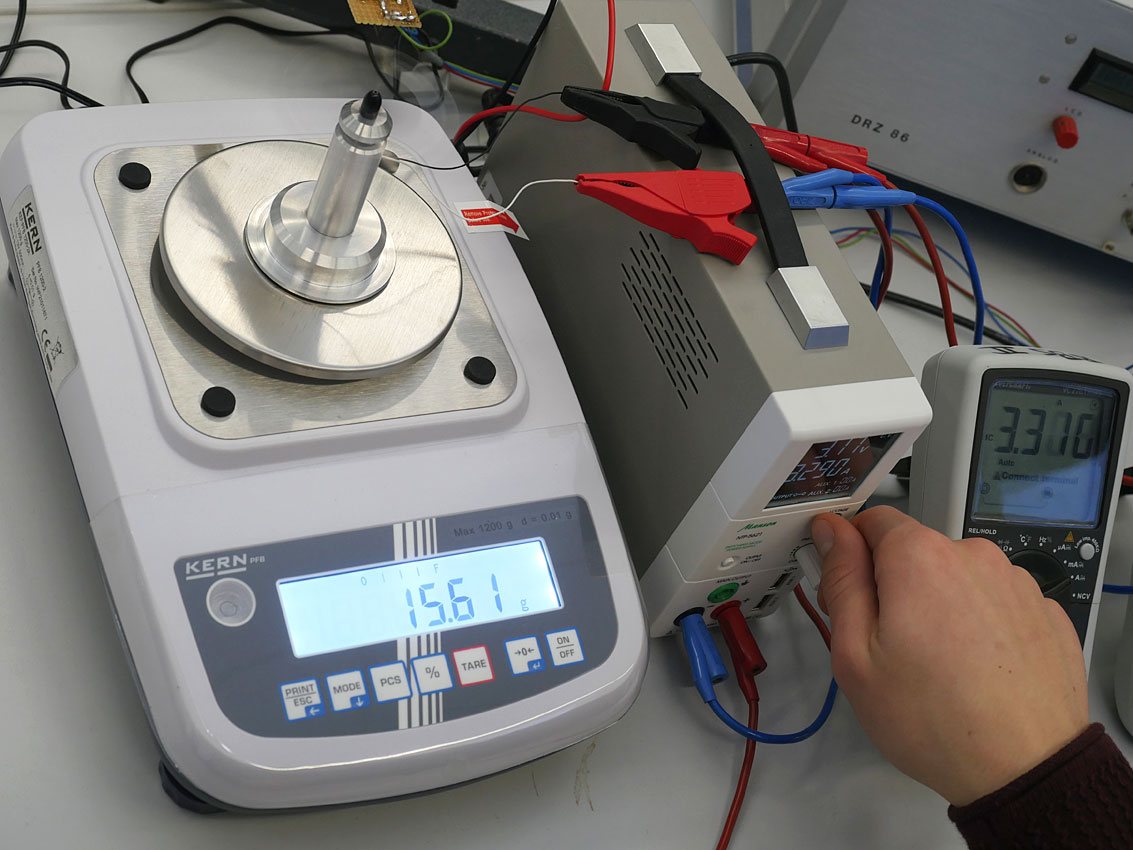
Um die Drehzahl des Motors unter diesen Bedingungen und die damit erzeugte Auftriebskraft messen zu können, wurde eine Reflexlichtschranke zusammen mit einem Drehzahlmessgerät und die Präzisionswaage PFB 1200-2 der Firma KERN eingesetzt. Der Area Sales Manager von KERN, Aleksandar Delic, stellte uns diese Waage für unsere Messungen zwei Wochen lang kostenfrei zur Verfügung. Da in dieser Zeit ein kleiner Schul-Etat für den Kauf der Waage vorhanden war, ist diese erfreulicherweise in den Besitz der BBS II übergegangen.
Aus einer Motorkennlinie konnten die Schüler:innen den erforderlichen Gesamtstrombedarf der Minidrohne mit ca. 20 A (4 x 5 A) ermitteln. Ein sehr hoher Wert, für den dann ein geeigneter Lithium-Polymer-Akku (LiPo) gefunden werden musste.
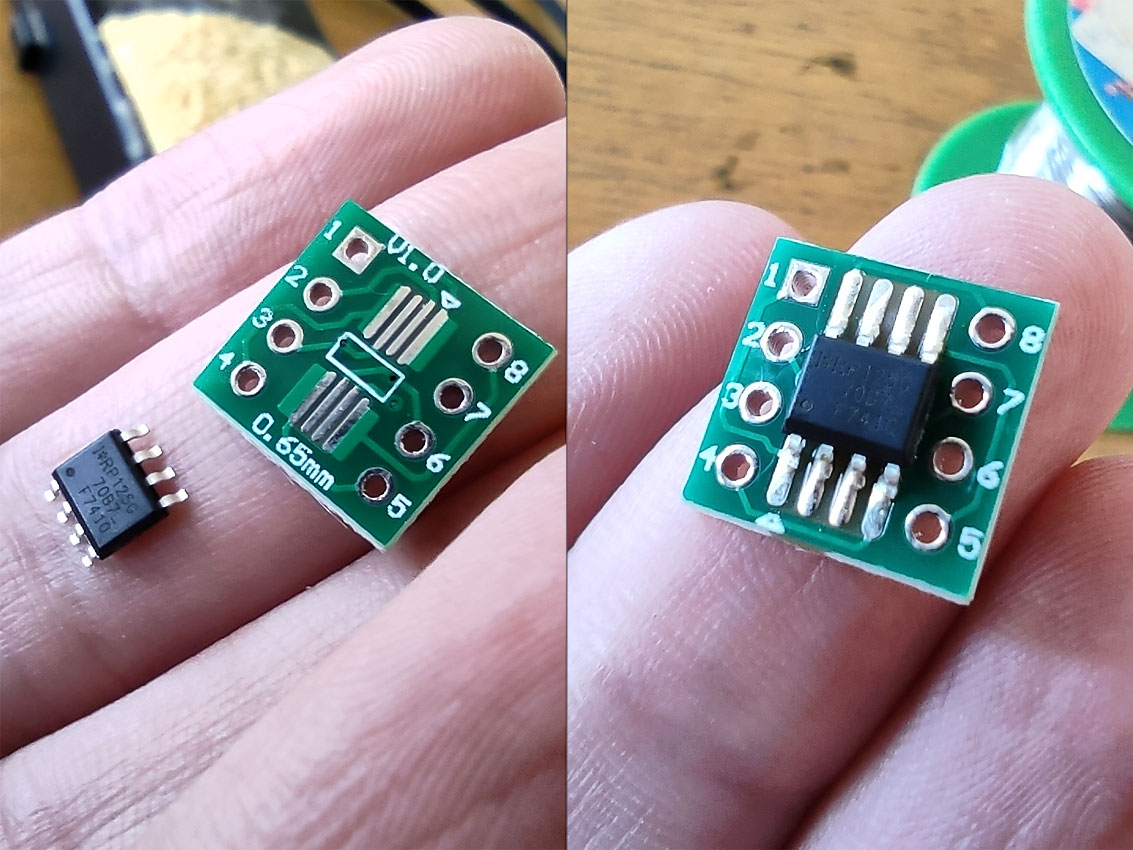
Da kein Mikrocontroller diese hohen Ströme an seinen Ausgängen bereitstellen kann, mussten die Schüler:innen nun eine Steuerschaltung für die Motoren entwickeln. Dabei handelt es sich um eine Verstärker-Stufe, die über Transistoren und MOSFETs die an den Ausgängen des ESP32 bereitgestellten kleinen Ströme so verstärkt, dass die Motoren mit ihren Nennströmen angetrieben werden können.
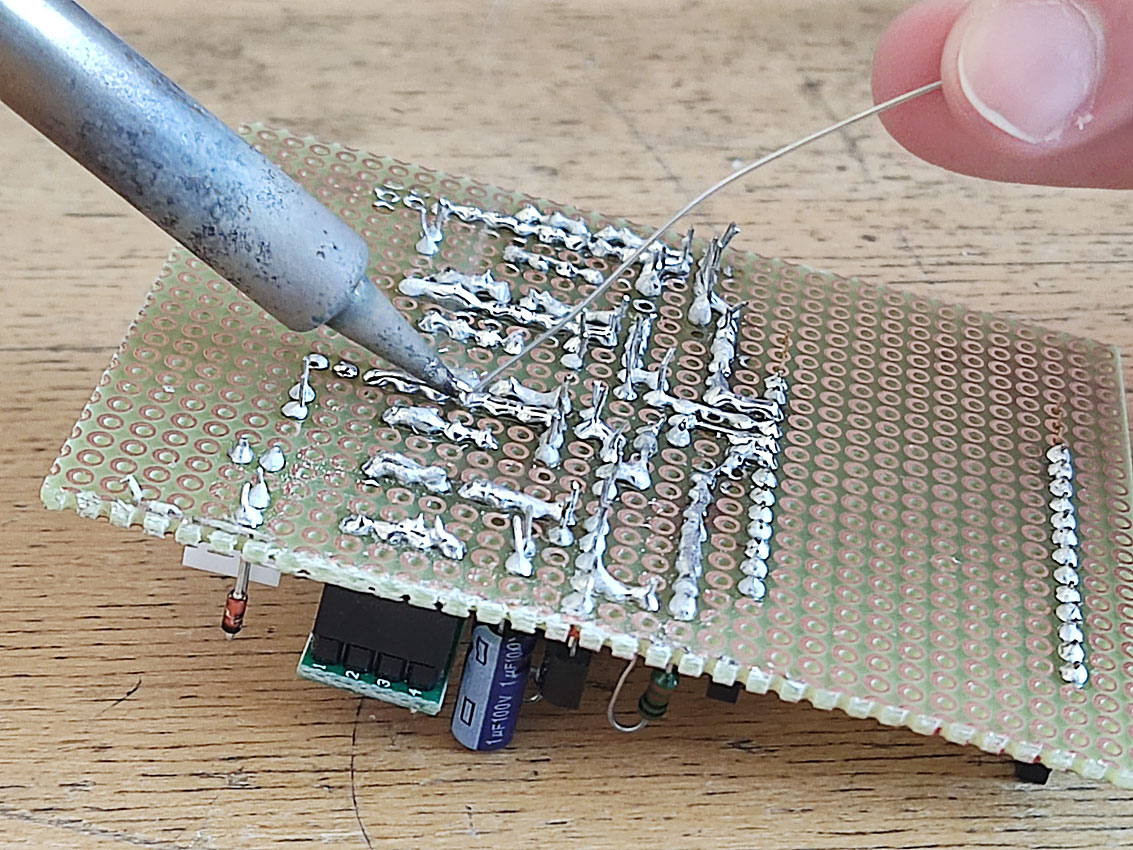
Die Schaltung ist nun fertig und muss mit den Motoren und dem Akku elektrisch verbunden werden. Dann soll geprüft werden, ob die Drohne mit der Last der Platine und des Akkus abheben kann.
Das nächste interessante Arbeitsmodul wird dann die Realisierung der Lagestabilisierung mit Hilfe einer digitalen Regeleinrichtung und einem Sensor sein, der die Winkelgeschwindigkeiten und Lageänderungen aller drei Raum-Achsen der Drohne erfassen kann.
Wer sich für diese Technik begeistern kann, hat jetzt zum Schuljahresbeginn wieder die Möglichkeit, in das Projekt einzusteigen. Ihr erhaltet eine systematische Einführung in den aktuellen Projektstand, einen Einstiegskurs in die Programmierung des Mikrocontrollers und in die bisher entwickelte Hardware.
Ein spannendes Projekt, das interessante Entwicklungsaufgaben im Software- und Hardwarebereich bietet und sehr umfangreiches praktisches Wissen für euch bereithält.

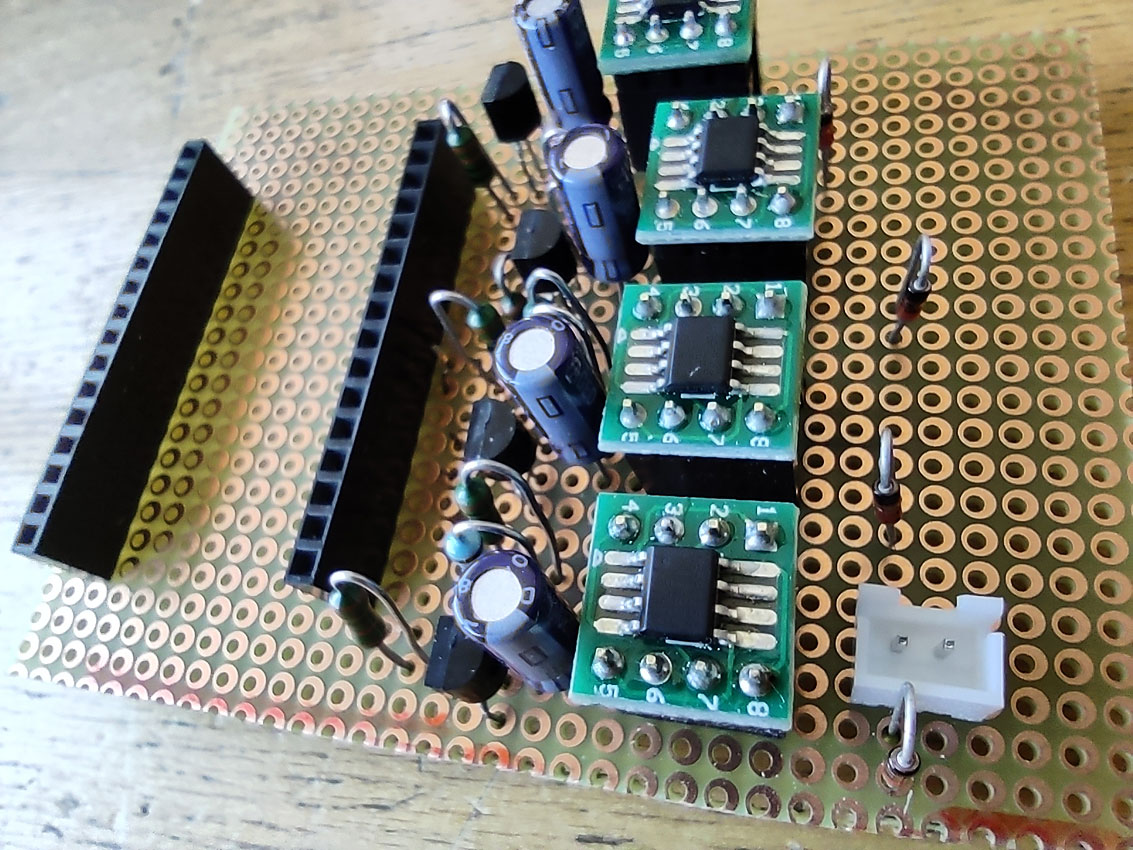
Drehzahlsteuerung eines Antriebsmotors über PWM